那么,AR这么“红”,到底是凭什么呢?就让小编来告诉你吧!
AR是增强现实(Augmented Reality)的简称,指通过计算机系统提供的信息增加用户对现实世界感知的技术,将虚拟的信息应用到真实世界,并将计算机生成的虚拟物体、场景或系统提示信息叠加到真实场景中,从而实现对现实的增强。
或许很多人对它的“近亲”VR(虚拟现实)更为熟悉,甚至常常将两者混淆。不过,虽然AR技术的出现源于虚拟现实技术(Virtual Reality,简称VR)的发展,但二者还是存在明显差别的。
虚拟现实(VR)是利用PC模拟出三维空间的虚拟世界,可以提供给用户关于视觉、听觉等感官的模拟,并且能够及时、没有限制地观察三维空间内的事物,从而达到以假乱真的沉浸感。
增强现实(AR)则是通过摄像机影像的位置及角度精算并加上图像分析技术,让屏幕上虚拟世界可以和现实世界场景进行结合与互动。
简单来说,VR技术给予用户一种在虚拟世界中完全沉浸的效果,是另外创造一个世界;而AR技术则把计算机带入到用户的真实世界中,通过听、看、摸、闻虚拟信息,来增强对现实世界的感知,实现了从“人去适应机器”到技术“以人为本”的转变。
什么?还要再简单点?没问题,上图:
这是VR:

而这才是AR:

现在你应该理解二者的不同,并可以成功将它们区分开了吧。很好!那让我们趁热打铁,了解一下AR的技术原理。
AR从其技术手段和表现形式上,可以明确分为大约两类,一是Vision based AR,即基于计算机视觉的AR,二是LBS basedAR,即基于地理位置信息的AR。
(1) Marker-Based AR
这种实现方法需要一个事先制作好的Marker(例如:绘制着一定规格形状的模板卡片或者二维码),然后把Marker放到现实中的一个位置上,相当于确定了一个现实场景中的平面,然后通过摄像头对Marker进行识别和姿态评估(Pose Estimation),并确定其位置,然后将该Marker中心为原点的坐标系称为Marker Coordinates即模板坐标系,我们要做的事情实际上是要得到一个变换从而使模板坐标系和屏幕坐标系建立映射关系,这样我们根据这个变换在屏幕上画出的图形就可以达到该图形依附在Marker上的效果,理解其原理需要一点3D射影几何的知识,从模板坐标系变换到真实的屏幕坐标系需要先旋转平移到摄像机坐标系(Camera Coordinates)然后再从摄像机坐标系映射到屏幕坐标系。
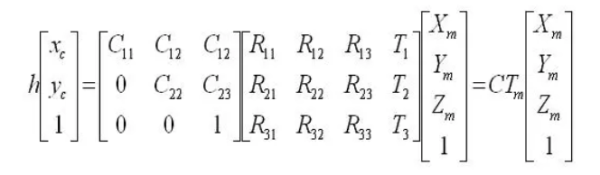
在实际的编码中,所有这些变换都是一个矩阵,在线性代数中矩阵代表一个变换,对坐标进行矩阵左乘便是一个线性变换(对于平移这种非线性变换,可以采用齐次坐标来进行矩阵运算)。公式如下:
矩阵C的学名叫摄像机内参矩阵,矩阵Tm叫摄像机外参矩阵,其中内参矩阵是需要事先进行摄像机标定得到的,而外参矩阵是未知的,需要我们根据屏幕坐标(xc ,yc)和事先定义好的Marker 坐标系以及内参矩阵来估计Tm,然后绘制图形的时候根据Tm来绘制(初始估计的Tm不够精确,还需要使用非线性最小二乘进行迭代寻优),比如使用OpenGL绘制的时候就要在GL_MODELVIEW的模式下加载Tm矩阵来进行图形显示。
(2) Marker-Less AR
基本原理与Marker based AR相同,不过它可以用任何具有足够特征点的物体(例如:书的封面)作为平面基准,而不需要事先制作特殊的模板,摆脱了模板对AR应用的束缚。它的原理是通过一系列算法(如:SURF,ORB,FERN等)对模板物体提取特征点,并记录或者学习这些特征点。当摄像头扫描周围场景,会提取周围场景的特征点并与记录的模板物体的特征点进行比对,如果扫描到的特征点和模板特征点匹配数量超过阈值,则认为扫描到该模板,然后根据对应的特征点坐标估计Tm矩阵,之后再根据Tm进行图形绘制(方法与Marker-Based AR类似)。
这种AR技术利用设备的GPS功能及传感器来实现,摆脱了应用对Marker的依赖,用户体验方面要比Marker-Based AR更好,而且由于不用实时识别Marker姿态和计算特征点,性能方面也好于Marker-Based AR和Marker-Less AR,因此对比Marker-Based AR和Marker-Less AR,LBS-Based AR可以更好的应用到移动设备上。
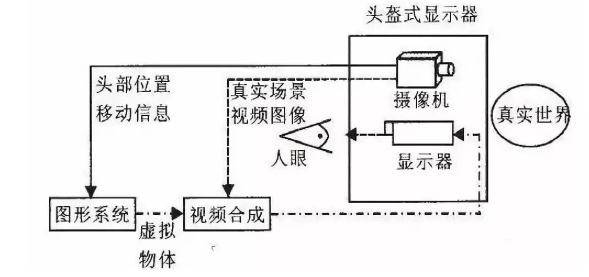
一个完整的增强现实系统是由一组紧密联结、实时工作的硬件部件与相关的软件系统协同实现的,常用的有如下三种组成形式:
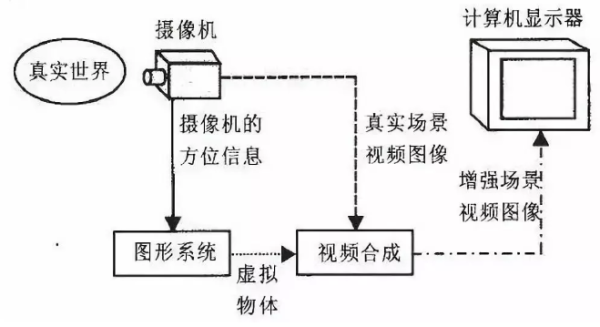
由于这套方案的硬件要求很低,因此被实验室中的AR系统研究者们大量采用。
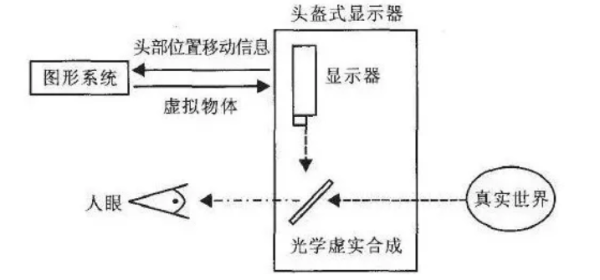
光学透视式增强现实系统具有简单、分辨率高、没有视觉偏差等优点,但它同时也存在着定位精度要求高、延迟匹配难、视野相对较窄和价格高等不足。
AR游戏玩到嗨
AR技术在游戏方式方面带来了巨大的革新。像大家比较熟悉的《Pokemon Go》、《小龙斯派罗》等,都是非常不错的AR游戏。想象一下,往后的游戏不再需要复杂的场景建模,而是在真实的世界里游戏,同时在真实的世界里又能出现许多虚拟叠加进去的事物,这是一种多么棒的体验!游戏也能摆脱场地与空间的束缚,可以随时随地开始。
“透视眼”逛博物馆
在底特律艺术学院,参观者可以借助一部搭载Tango技术的手机查看到展出的埃及木乃伊内部结构以及其他展品细节。简单来说,Tango会将扫描获得的木乃伊石棺内部图像叠加到手机拍摄画面上,于是,隐藏在纱布最里面的古埃及骷髅骨架和其他隐藏艺术文物就展现在我们面前。这就相当于你拥有了一双透视眼。
足不出户选家具
有一款叫做iStaging的Tango应用,可以让你足不出户选购家具,并且可以通过3D模拟绘图,将家具虚拟地摆放到家中合适的位置,让你预览整体效果。这些家具的AR呈现效果在空间感和大小比例上都非常出色,几乎和在宜家逛样板间没什么区别。
总结
尽管目前就AR技术而言,国内技术略逊色于国外,但就应用来说,我国还是占据明显优势的。有专家预测,到2020年,AR将开始在B端爆发,预计到2025年,AR会真正迎来全面的爆发。是否真会如此,还让我们拭目以待。
